


Two problems blind people often encounter when walking are colliding with obstacles and overshooting or missing completely their intended destinations. Our solution is to combine collision-avoidance measures with navigation guidance systems, using the locations of our users with beacons installed as geology fences at key locations which need high navigation accuracy.
1.Executive Summary
Two problems blind people often encounter when walking are colliding with obstacles and overshooting or missing completely their intended destinations. Our solution is to combine collision-avoidance measures with navigation guidance systems, using the locations of our users with beacons installed as geology fences at key locations which need high navigation accuracy. As a failsafe, crowdsourcing maps can be utilized to ensure our users maintain their correct paths and arrive at their intended destinations. To avoid collisions, the SLAM system combined with a two-eye depth camera will detect obstacles around our users and ensure their uneventful safety while using our navigation system.
2.Problem Definition
More than 3.4 million people in the United States are legally blind or at least visually impaired (having VA of 20/40 or less)[i]. Over the next three decades, the adult population with vision impairment and age-related eye diseases is estimated to double because of the rapidly aging U.S. population[ii]. Additionally, the growing diabetes epidemic as well as other chronic diseases is projected to contribute to the increase of vision loss in the overall population.
A visually impaired person encounters a vast number of difficulties in their daily life, including problems with identifying people, places, and things; reading and writing; and description using visual cues. Walking, a process which relies heavily on identification, is particularly difficult for the visually impaired person. When walking, people are constantly recognizing objects and their surrounding environment in order to safely navigate to their final location. Despite this difficulty, it is nearly impossible to avoid stepping outside.
Through interviews with six blind people, we compiled some difficulties commonly faced by individuals with visual impairments. The principal difficulties faced by individuals with visual impairments are obstacle avoidance and destination navigation.
There are several kinds of obstacle avoidance that blind people would encounter:
– Avoidance of fixed facilities such as walls, buildings, and fire hydrants
– Avoidance of moving obstacles such as moving cars and pedestrians
There are also several kinds of geology information estimation blind people have to do when walking outside:
– Estimation of destination to map travel routes that they have arrived at their destination
– Estimation of traffic conditions to determine whether or not they can continue walking
Currently, the two primary methods of obstacle avoidance for individuals with visual impairments are the white cane[iii] and the guide dog[iv]. The white cane detects obstacles which are only immediately imminent within several steps. This method exerts the lowest financial expenditure and is very easy to learn and manipulate for the user, but in addition to its short reach, the white cane can also only detect obstacles which are on or immediately above the ground.
Guide dogs are a more efficient method of obstacle avoidance and are a comparatively recent development. However, because of a shortage of dog trainers coupled with the high price of procuring and maintaining a guide dog, only about two percent of people with visual impairments currently utilize guide dogs[v]. Even when utilizing a guide dog, individuals with visual impairments still rely on navigation services such as Google Maps to guide them to and alert them of their arrival at their intended destinations.
There are some concepts that could potentially aid individuals with visual impairments when they are walking outside.
3.Concepts for Solving the Problem
After uncoupling user demands, we can find that the demands for collision avoidance and demands for navigation are independent of each other, which means that we can solve those two demands individually.
3.1Collison Avoidance
The key complaint that white cane users have is that the cane does not cover all of the ground that our users traverse, which means that the users cannot entirely ensure that they will not collide with any obstacles in their path when traveling. For this, the function requirement we need to meet are:
– Determining that our users’ pathways are safe from obstacles which are collision risks
– Notifying users of collision risks with ample time to adjust accordingly
Following are several concepts that can potentially meet our function requirements.
3.1.1SLAM System
Simultaneous Localization and Mapping, or SLAM for short, is an indoor mapping and navigation system most commonly used by robotic vacuum cleaners. SLAM hardware requirements vary and depend on the level of accuracy which users want to achieve. In our concept, we use a two-eye camera to build the SLAM system. A two-eye camera has lower accuracy, but it achieves enough accuracy to fulfill our requirements[vi]. Although the traditional lidar+ panoramic camera method would achieve a higher level of accuracy, the bulk and weight of this camera are not suitable for our uses.
3.1.2Ultrasonic
For detecting impending obstacles, we can also utilize ultrasonic, the easiest and most cost-effective option available to us. Ultrasonic can usually detect obstacles in a 3-5 meter range[vii], but it has a relatively high environmental requirement and is compromised by inclement weather conditions such as rain or snowfall.
3.1.3Artificial Intelligence and Machine learning about obstacles and collision
Artificial Intelligence is another potential method of obstacle avoidance for our users. However, the accuracy of AI relies heavily on the AI’s information learned during its training, and its network requirement will be yet another limitation for users when using an AI-based collision avoidance system.
3.1.4Sound Feedback System
A well-designed sound system has the potential to give users as much information as they need and want, and it requires a minimal learning cost expenditure. However, when using sound to receive navigation information, users might accidentally ignore or not be able to hear the system’s feedback whether because of attention or their surrounding environment.
3.1.5Vibration Feedback System
The advantage of vibration is that it will not occupy the user’s eyes and can provide feedback in real-time. Yet, the information vibration could deliver is limited.
3.1.6Concept Selection
To select from our possible concepts, we considered the following design parameters and function requirements:
Function Requirements:
– The ability to cover an area large enough for users (about 2 feet x 6 feet or enough for the next 5 seconds of forward movement)
– The ability to detect potential collision risks with accuracy
Design Parameters
– The system should be small so as not to create additional burden for the user
– The cost expenditure should be user-friendly and affordable
From our FR and DP, we choose two-eye SLAM+ vibration feedback as our collision avoidance system because of the following reasons:
– A two-eye depth camera is all we need to create a basic SLAM system, and a basic SLAM system such as the Intel D415 already fulfills this requirement according to a review by 3d Scan-expert[viii]
– Our SLAM system would be small enough to conveniently carry
– The price for the two-eye camera SLAM system would be around $200-300 USD, which is extremely affordable in comparison to a guide dog
3.2Navigation
As previously mentioned, the most critical problem with navigation is accuracy or the lack thereof. Although Google Maps and Maze are able to plan routes and navigate users to most destinations, they are still unable to guide users to a small, specific destination such as a bus stop or a specific room indoors. Our plan is to combine a variety of technologies and methods to improve the precision and coverage of the navigation capabilities, allowing individuals with visual impairments to find and verify their final destinations.
3.2.1Using Beacons to Locate
Using beacons in places that are particularly difficult to navigate to, tour users can interact with our system to determine whether or not they have correctly navigated to their destination. One downside with this is that if the users are too far from any beacons, they will experience difficulty with their navigation guidance and destination arrival. This feature will function more as a method of verification as opposed to a method of navigation guidance.
3.2.2Using a SLAM System to Navigate
We can use the SLAM system to do real-time mapping and navigation guidance, but it can only be used indoors and requires that users walk along the borders or edges of their travel areas. Its application scenarios may be limited.
3.2.3Crowdsourcing Detailed Map
In this concept, we would rely on volunteers to provide detailed information about critical locations so that users could navigate and guide themselves to their destinations. However, this method requires a massive amount of volunteers to collect information about specific areas, and the accuracy of this information will be dependent on contributions as opposed to preset data.
3.2.4Concept Selection
Taking into consideration that the locations to which our users need navigation guidance can be located both outdoors and indoors, we chose to use a combination of beacons, crowdsourced maps, and Google Maps’ route planning function to help our visually impaired users navigate to and reach their final intended destinations.
4.Proposed Solution
In this section, we will describe the technology we used and the specifications of our system, then specify the human-computer interaction and the industrial design considerations.
4.1Collision Avoidance
As we discussed in the concepts section, we would use the two-eye camera to blind a visual SLAM system. We use the depth of field to estimate the distance between users and moving obstacles such as pedestrians and cars. In the meanwhile, using GPS evaluation and imagination comparison, we will be able to mark the fixed objects on the daily routine of our users, such as walls or fire hydrant. We would use a typical visual SLAM method to process our images.
In the visual odometry and back-end optimization part, we use a series of pictures taken by our camera to calculate and estimate the depth of the field in order to estimate the distance between users and obstacles.

Figure4.1 Process Procedure of SLAM system
In the loop closure detection part, when users are walking to places that they have walked before, we could compare the key frames taken at that moment to the images we took earlier, thereby enabling us to get a more accurate result about the obstacle recognition.
In this solution, we would use ORB-SLAM algorithm to finish this process; ORB-SLAM is a developed and open-sourced SLAM system, got relatively high evaluation in Github.
4.2Accuracy Navigation

We plan to use beacon+ crowdsourcing maps to do this accuracy navigation. The processes are as follows.
Figure4.2 General Process of users interact with beacons
The typical user scenarios would include:
1. Using Google Maps to plan the route
2. Using Google Maps +GPS to do overall navigation
3. When approaching destinations or public transportation sites that require higher accuracy, such as a bus pole, our system begins to search beacons and tells users about the detailed information of the location. In this situation, GPS would not be accurate enough to guide users to the exact place.
4. Once the system is connected to one of the beacons, we could know the precise spot where our users are located.
5. In the meanwhile, the system would describe the detailed information of the spot users are looking for.
4.2.1Beacons

We would use Bluetooth Low Energy (BLE) as our beacons. To ensure the reliability of beacons, we have made them as simple as possible. The beacon itself will be only responsible for sending its serial numbers. We use our system to receive this information and estimate the location by retrieving its locations by serial number.
We would install multiple beacons (beacon groups) around the locations that we would like to provide accurate navigation. We would use two sources of information that our beacon offers to make the navigation process smoother.
Figure 4.2.1 Detection Process of Beacons
1. Whether the user entered one of our beacons: if users entered one of the beacons areas we set, we could determine our users’ exact locations.
2. The first beacon our users entered: as can be seen in the Figure 4.2, we will set multiple beacons around our key locations. We could predict users’ next step by estimating the first beacon users step into. For example, if one user connects to the beacon inside a beacon group near a bus pole first, then this user must be taking a bus from anywhere else to our location. By this method, we could verify the route of our users.
4.2.2Crowdsourcing Maps
We would provide information about the locations we mentioned before to ensure that blind people could find the exact locations even when they are not able to connect to the beacons. This mapping system would provide detailed information about the key locations blind people have to locate throughout the whole navigation process. For example, when blind people approach a bus pole, the system would describe the detailed information to the user:
– This bus stop is a pole
– This bus stop is three feet away from the curb
– This bus stop is on grass

Overall processing procedures are as follows.
Figure4.2.2 Process of Crowdsourcing Mapping System
The whole process of our system is a process wherein volunteers provide information, and blind people receive information. The function of our system is to filter information for both volunteers and blind people. The critical feature of this system for volunteers is to ensure the quality of the data, include the locations that needed to be described, and determine the way and key facts that should be included in the description. In the meantime, the key function of this system for blind users is providing correct information at the correct time. The system would estimate users’ current location by combining GPS and beacons location information, and deliver detailed information about current locations to our users.
4.3Human-computer Interaction
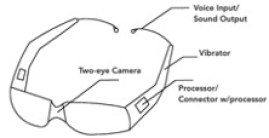
As we discussed before, from the aspect of bulk, the main component of our system is the two-eye camera. As our interaction methods are voice/sound and vibration, we don’t have to add a monitor or other components that would involve large volume, so the final volume of our system will still stay small.
Considering that blind people would use our system or wear our system for the whole day, an ideal solution would integrate our system with everyday objects used daily by blind people. At last, we decided to combine our system with glasses.
Figure 4.3 Shape of Our System
5.Expected impact
There are 3.4 million blind people in the US. This system would give them a new way to go out and explore the world.
From the emotional side, the thought that I have heard most frequently is that blind people want to go out for a walk or to travel to new places independently. If this system could help them while walking outside and enable them to feel more empowered and secure in their environment, this would be the most significant impact that this system could achieve.
6.Feasibility and Marketability
6.1Feasibility
From technology side, the technology and components that we used are all existed.
From manipulation side, the difficulties of delivering this system to the whole society lay in two aspects:
– Beacon installations. As in our system, users would need to interact with the beacons installed in the destination; the numbers of beacons and their installation and maintenance would be a potential problem.
– Quality of crowdsourcing maps. The coverage of crowdsourcing maps would require a lot of human resources.
6.2Marketability
The key components of our system are two-eye camera and glasses. Other components of our system, such as voice control part and beacons connector, can be offered by a standard mobile phone. Thus, the material cost of the whole system will be no more than 300 USD. This price is much cheaper than our competitors. Similar products, such as SUNU Band would cost 300USD but can offer obstacle detection function only.
7. Appendix
From my point of view, in the whole process of system design, it’s critical to define the statement of the problem and to find the real need of users. A developed definition of the problem will be beneficial in finding the solutions. The inclusion that comes from logic and data might look correctly, yet will still be highly possible that this conclusion is not what users need.
Our original thought was to help blind people solve the problem that tactile pave being occupied. After decomposing this problem, we find out that this problem was not the critical problem in blind people’s life when they are walking outside. So, my problem shifted to helping blind people to design a system that could help them walk to any destinations they want to.
At the first beginning, when I was defining the pain-point of blind people going outside, my thought was to classify and solve those scenarios one by one. From the logical side, there must be a goal for blind people when they are going outside. The demand will be solved if we solve that goal. For example, if blind people want to buy some housing supplies, the purpose of this system can be to help them to obtain housing supplies but not be guiding them to the groceries.
When I talked to our real users and tried to understand their demands, I found that going outside is not just finishing the task blind people have. Blind people desired to walk on the street, not only because they want to accomplish what they must do for the living, but also because of emotional need, such as breathing fresh air, doing things all by themselves without helping.
After conducted the whole research about the real needs of our users, I changed my problem statement aging into helping blind people to arrive at any destinations they want. After I choose the right topic, the whole process of narrowing down problem scope become much easier.
I would
like to allow any portion of this term paper and milestone presentations be
used for the teaching material in the future of this class
[i] National Federation of the Blind, (2017). “Statistical Facts about Blindness in the United States”. From https://nfb.org/blindness-statistics
[ii] World Health Organization, (2018). “Global data on visual impairment”. From https://www.who.int/news-room/fact-sheets/detail/blindness-and-visual-impairment
[iii] Wikipedia, “White cane”, (2018). https://en.wikipedia.org/wiki/White_cane
[iv] Guiding Eyes for the Blind. (2017). “General Information.” From https://www.guidingeyes.org/about-us/general-information/.
[v] Guiding Eyes for the Blind. (2017). “General Information.” From https://www.guidingeyes.org/about-us/general-information/.
[vi] Overall information about SLAM. (2018). From https://www.leiphone.com/news/201605/5etiwlnkWnx7x0zb.html
[vii] Wikipedia, “Ultrasonic” (2018). From https://en.wikipedia.org/wiki/Ultrasound
[viii] 3DScanexpert, “3d scan sensor shootout realsense d415 vs sr300 vs orbbec astras” (2018). From https://3dscanexpert.com/3d-scan-sensor-shootout-realsense-d415-vs-sr300-vs-orbbec-astra-s/